Hiya
I’m getting a bit bogged down with this build (that’s what you get for getting a load of parts without instructions I spose!)
I have
APM 2.8
Devo 7E tx
Devo RX701 receiver
mavlink mini OSD
Ublox-6M GPS module
Power module
3DR Radio Telemetry 915 Mhz
F550 Quadcopter Hexacopter Frame
XXDA2212 13T 1000KV Motor
XXD 30A ESC
I have connected the receiver to the APM and the tx and tested / configured using mission planner, and connected the ESCs
questions are:
do I need to user the power board or will the APM FC take it’s power from the ESCs? ( I didn’t get any jumpers with the controller, so where can I get these if I need one)
can I get longer cables to connect the ESCs to the flight controller (preferable female to male so I don’t need to solder anything!)
can I get the relevant cables to connect the telemetry to the OSD / Camera / FPV transmitter - if so where?
cheers!
Yes you can power it via your ESC as long as its 5V, but usualy its best to power via the power module because then you also get added current and voltage monitoring on your drone.
Yes we sell a bunch of servo extension leads here
Usually you get the cables with each module and then you just gotta solder them together, but if not the best is to get a bunch of female to female jumper cables
thanks Alex!
I’ll see what I can work out… with the APM 2.8 do I need to put a jumper across the no 1 input if I use the power board? and can I just use a jumper lead (as the ones you linked?)
just inspecting the module… would the jumper be pre-installed?
cheers!
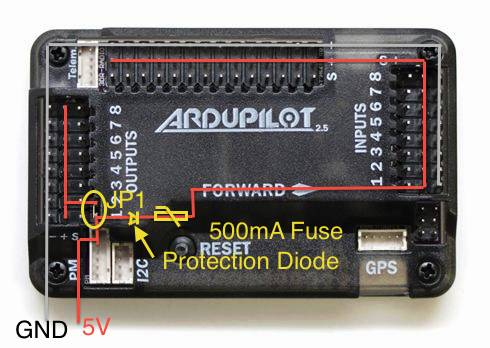
If you want to power your APM just from your ESC then you will need to connect JP1 to connect the R/C outputs with the main part of your board. The location is shown in the image below… Hope that helps 
Also if you dont have a jumper you can take the APM out of the case and just solder a short between the JP1 pins
so… if I’m using the power board to power the APM (with the jumper on JP1) do I need to disconnect the power wires from the ESCs? or will it all be fine just plugged together using the connecters as they came?
cheers!
If your esc are using switch mode BECs then yes for all except 1, if you are not sure then yes too just to be safe. Otherwise if your esc have no bec or linear bec then it’s no problem.
OK, everything up and running, but when I try to take off the drone flips forwards instantly (which is annoying and snaps the props)
I’m running APM 2.8 with a devo 7E tx and devo RX701 rx - the APM board is running v3.2.1 firmware
heard lots of problems like this but not solutions!
any clues?
cheers!
Here are a few things to check:
- Have you got any mixing setup on your radio?
- Are you ESC’s properly calibrated
- Have you performed a radio calibration in mission planner?
- Are all your props on the correct way
- Are your motors connected to APM in the correct order?
- Are you motors all spinning in the correct orientation?
no mixing set up on the tx - and only the HOLD switch being used for flight modes - tx flashed to deviation
flight modes all set to stabilize
radio fully calibrated in mission planner
ESCs calibrated individually
no gps
hexa X set up and all spinning the correct way (1045 anticlockwise props - 1045R on the clockwise rotating props)
it’s driving me bats!
cheers!
That is rather strange when it’s level on your desk, does the HUD in mission planner show it at level too? When you say it flips on takeoff is it aggressive or only a slight tilting tendency?
Also I had a customer with a similar issue a week ago and problem was the front props were mounted upside down, so just worth checking that, the writing should be facing upwards.
Hi Alex
thanks for your help!
the props are on correctly, the flip on take off is aggressive, I can’t get it into the air, even with a fast take off (and I’m used to flying cheap hexs!) it’s acting correctly until the power gets up enough to lift it as in it’s moving as I would expect when I apply pitch and yaw
the HUD in mission planners is showing that it’s completely level in all directions - all I can think of is that there is a problem somewhere that is reducing the power to the front motors - but can’t find it! there was a long thread from a few years ago where someone had this problem and it was the board, not settings - but don’t want to buy another one until I’m sure that’s the issue
cheers!
Update
changed the motor layout to Hexa +, now it flips backwards 
beginning to think that this really is the board that’s a problem!
any other ideas appreciated!
cheers!
Hi
I am fairly certain its not a bad board that is the problem, but rather a setting issue. Might be a good idea to factory reset your APM board and start again as there are hundreds of settings and one of them could be messing something up. These include the board orientation, or if your motors are not connected in the correct order, or. Have you run the motor sequence test?
we have a working drone!
I reset the board using mission planner, recalibrated everything, recalibrated the gyros using the all at once method (I did them individually the first time), and hooked up the gps / compass
no idea why it worked this time, but it did, and I managed a full battery worth of flight - bit unstable and drifting slightly, but that’s fixable
now for setting up flight modes, the telemetry and camera… expect more stupid questions!
thank you for the help and advice
Happy to help and to hear you got it working
back to the questions…! 
I have the minim OSD board, 3DR radio transmitter and receiver
I’ve connected the OSD board to the APM with a Y cable I bought from you
(https://www.unmannedtechshop.co.uk/telemetry-osd-y-adapter-cable-for-apm-v2/)
and I’ve modified the lead to connect to the telemetry radio air module (it’s a 4 pin plug not 6)
I have an FPV camera - https://www.unmannedtechshop.co.uk/fpv-camera-520-line-cmos-mini-camera-7g/ from you
this is plugged into the video in side of the minim OSD (not powered as yet)
I can connect with mavlink in mission planner if I connect the radio tx direct to the APM board, but if I connect the OSD I can’t connect at all, I’ve seen a few diagrams that show the radio tx powered from the camera battery, but I was hoping that the Y lead would mean the radio tx was powered from the APM board and all I needed to do was powere the camera…
I have a wiring diagram of my setup, but can’t seem to upload it!
any clues?
cheers!
Hmm essentially all you need for the osd is to connect the TX from your APM board to the Rx on your osd. The osd does not transmit any data back to your APM so that doesn’t need to be connected, and if it is it could case some issues with the telemetry module. also you will also obviously need to power your osd board, could be from the telemetry port, or via a 5v bec
OK, so basically connect the tx, ground and power from the APM to the OSD, then the radio tx to the other side of the board with a (max)12v power supply for the camera and tx, I’ll have a go at that once my video tx and rx arrive
what I’ve been trying to do is set up so I can have a FPV monitor and the mavlink connection to mission planner, but I guess this is going to be a fight 
cheers!
OK, got it working, just needed to change the tx and rx wires in the telemetry tx plug and APM telemetry plug, I now have telemetry to mission planner via mavlink and hopefully FPV with telemetry via the video tx when it arrives
cheers!
Happy to hear you got it all working, let me know how you get on with the FPV when it arrives