A newby here: I’m trying to get a hex flying - replacing a faulty APM 2.5 (with what I believe is a faulty compass on-board. See * below.) with an APM 2.8 Arducopter, 3DR GPS, (supposedly with a Ublox Neo-6M mag compass on-board), using Mission Planner 3.2.1.
- Everything works fine with the old APM 2.5 except the compass reverses east and west (when the 'copter is physically pointing east MP shows it is pointing west.) Radio-, compass-, GPS- and ESC-calibrations all work just fine - but the compass reads east and west backwards. North and south read correctly. I have no idea what is going on with that module. Replaced it twice with (supposedly) like module - neither of them worked AT ALL…
Received a new APM 2.8 modlule, installed it, along with the 3DR GPS/Compass. Radio-calibration checks out fine. When I try to do a compass calibration I get no indication in MP that the compass is outputting any signal. Rotating it through all the axis produces no dots on the calibration screen. The red light and the blue light in the GPS module are on (blue is on steady, red is on intermittently) The blue light (GPS) on the FC is on steady, the red light flashes continuously, as do the yellow and the amber lights. I get NO indication the board is arming the ESC’s when I try to do that.
Here are some photos of the APM 2.8
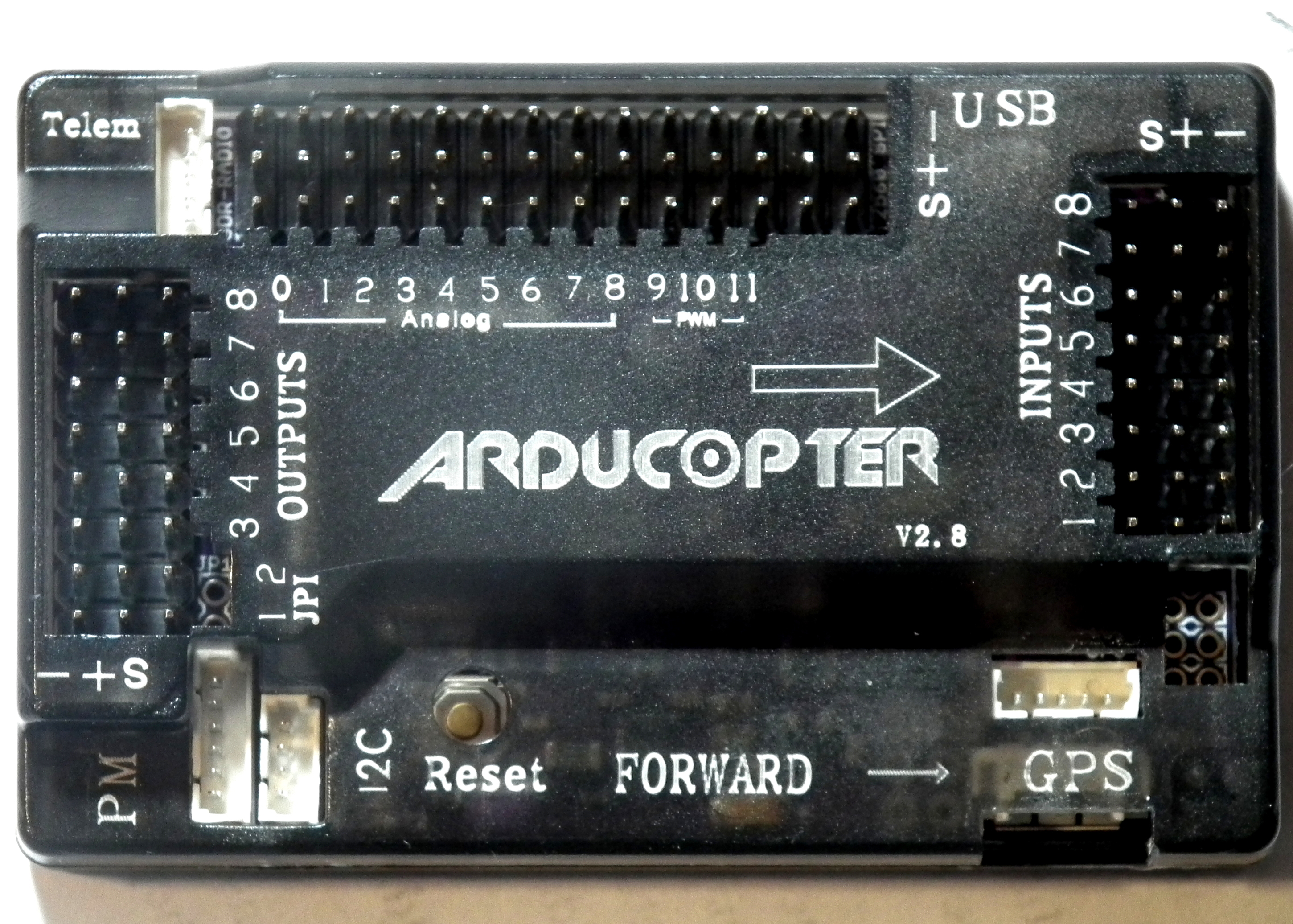
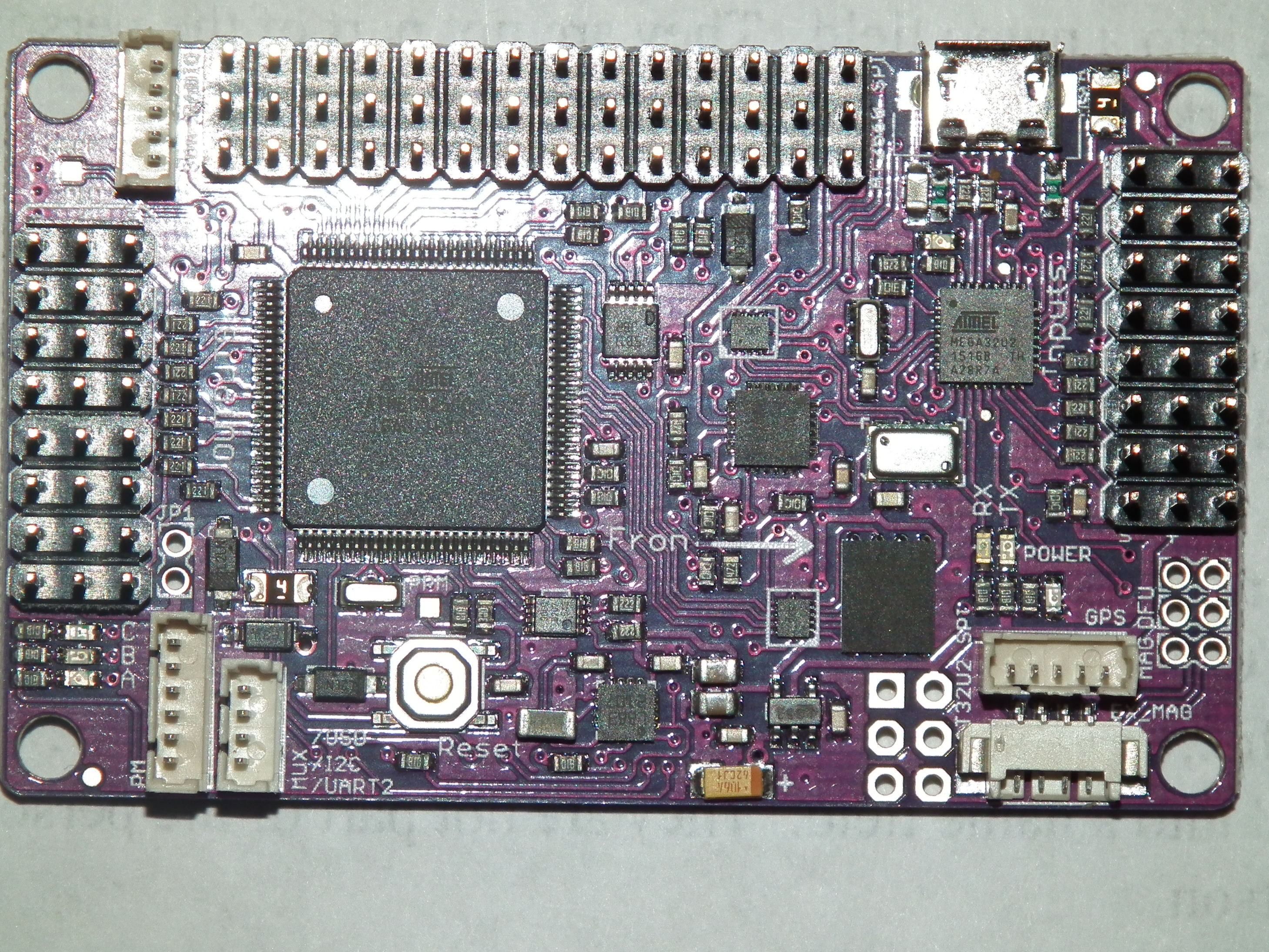
Some write-ups I have seen say the APM 2.8 DOES have a on-board compass, others say it does not. I can’t see anything that looks like a compass (like the one I can see on my old APM 2.5) but, then, I’m no electronic engineer either.
If it does have such a compass, how is it activated? (I’ve tried various combinations of “enabled”, “Not enabled” for both internal and external compasses in MP, but nothing seems to work. I have the 3DR GPS plugged into the GPS port on the top of the FC and the compass plugged into the compass port on te side, but don’t get any signal to MP when I try to do the compass calibration.
Any suggestions?
