This short and sweet article is for the beginner/ soon-to-be beginner into the drone sphere who wishes to know just a bit more of what actually goes into a drone. Although there are two main types of drone - fixed wing and multirotor - we stick to multirotors here for simplicity’s sake. So let’s begin, we first have…
… the autopilot/flight controller##
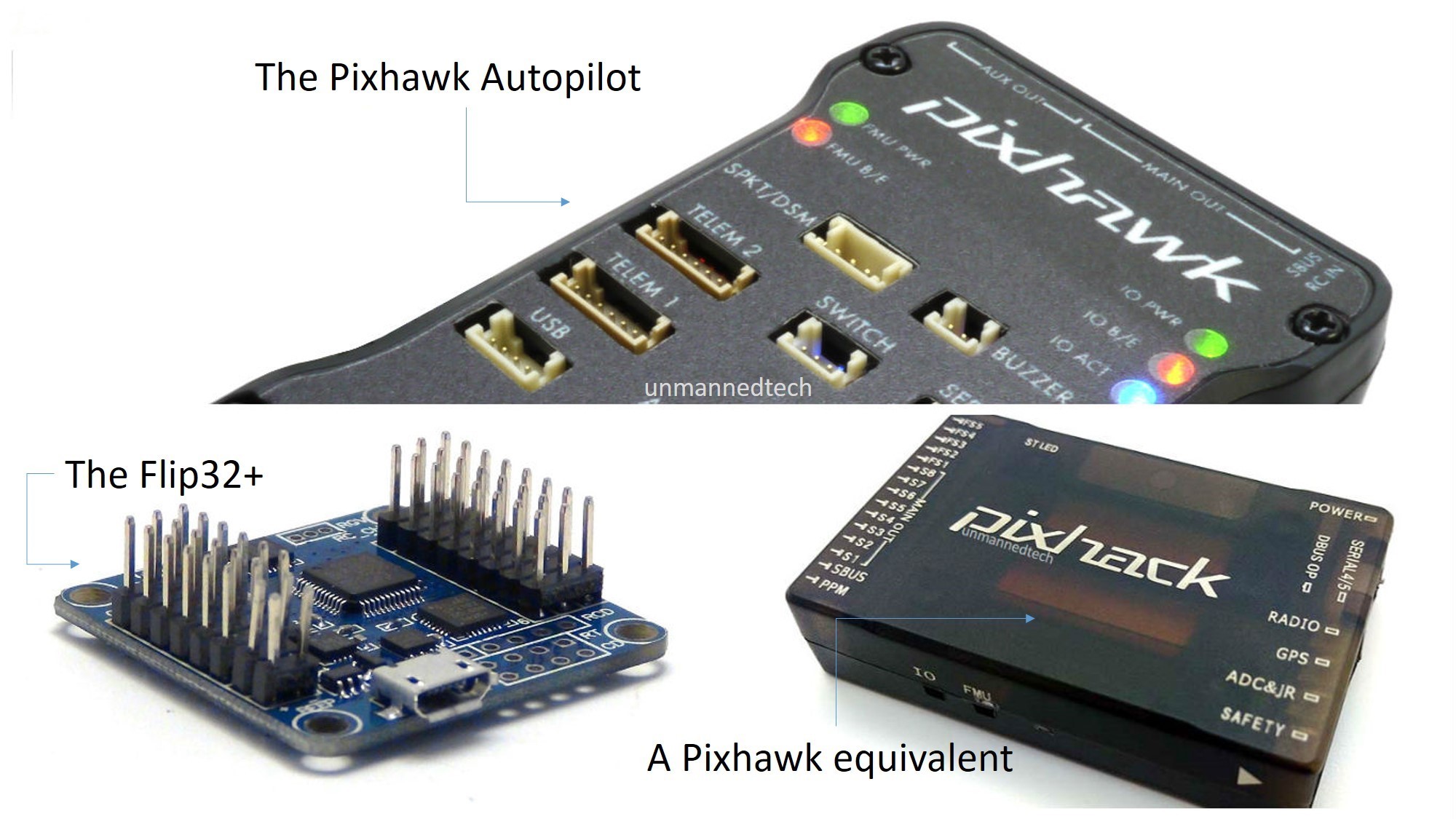
This is the ‘brain’ of the drone and so controls what the drone does - so this is quite an essential part. There are many different flight controllers, with many different applications, and come at a range of prices. There are endless applications with such autopilots as Pixhawk or equivalents but you can also get the more basic flight controllers such as the Naze/Flip 32 boards that are used for mini quadcopters. For more information on autopilots and flight controller, please see our guide.
We then have…
… the motors
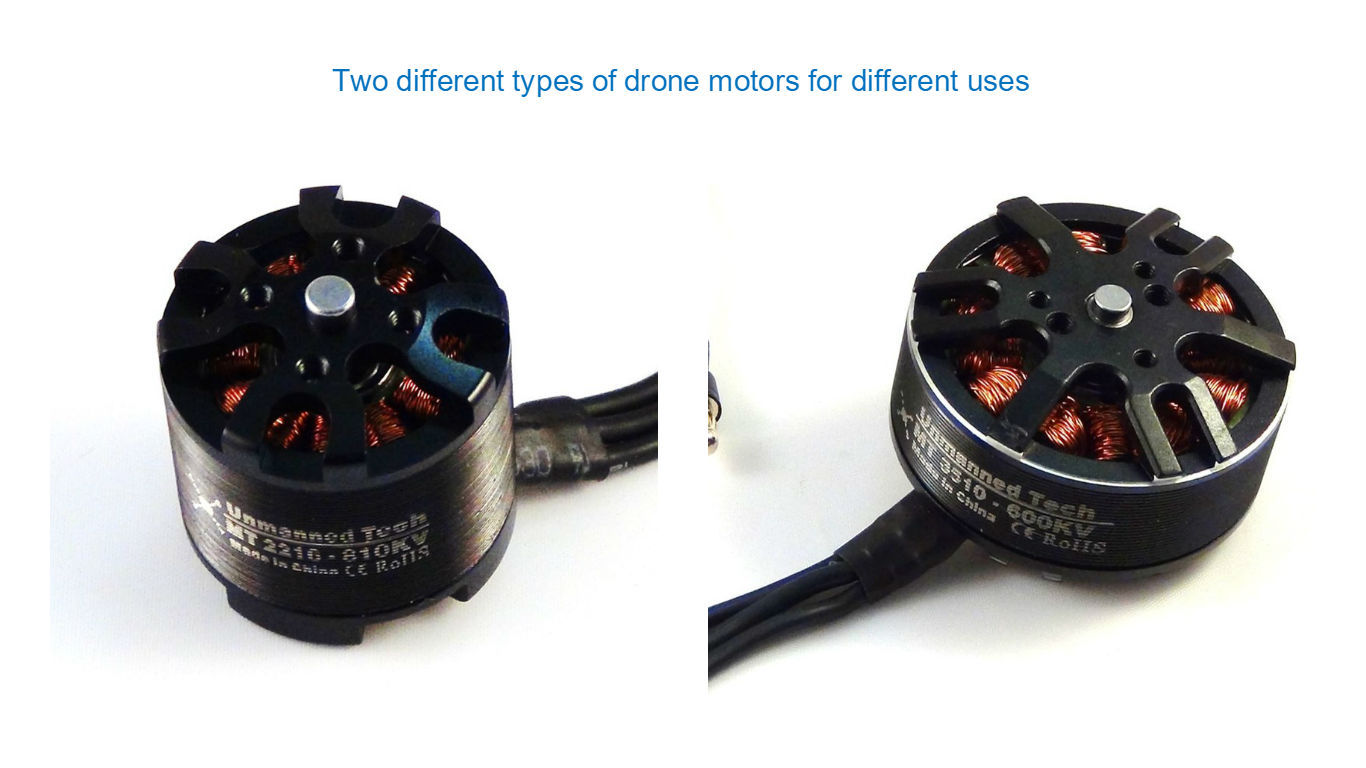
All drones will have a certain number of motors that are the driving force behind the machine. You can get drones that have 4 motors, 6 motors, 8 motors and so on pretty much until you want to stop. The 4 motor drones are called quadcopters, the 6 motors are called hexacopters and so on. For more information on motors, we have such guides as ‘Brushless motors - how they work and what the numbers mean’ and ‘How to choose the right motor for your multicopter drone’.
Almost as important as motors, we have…
… the propellers
These are attached to the motors and these are the objects that create the thrust necessary to lift your drone into the air. They come in all sizes, and the appropriate size of propeller for your drone depends on the size/weight of the drone itself. The choice for motors, ESCs (please see below) and propellers are unequivocally linked and so please see our motors/ESC/propeller buying guide for more info.

Getting slight more technical, we also have…
… the electronic speed controllers (ESCs)
Don’t let the acronym put you off, these are just some electronic devices that control the speed your motors spin at. They receive the commands from the flight controller, and relay them to the motors. These devices come in a range of sizes and you need different sized ESCs for different sized drones. As mentioned above, the choice of ESC is linked with the choice of motors and propellers, and so you can see our guide on this matter. We also have a more detailed article on what to consider when buying an ESC.

We also often nowadays have the additional add-on of …
… the camera and gimbal
This part of a modern drone is almost as common at the motors and propellers. They are, of course, not essential to making the drone fly, but having a camera on board the aircraft is often the reason why people want a drone in the first place and so it definitely needs a mention.
Now, we all know what a camera is (although in the case of drones, the cameras may be very small and not what we’re used to seeing), but what’s a gimbal? A gimbal is simply a mechanism for keeping a camera stabilised and so producing smooth footage rather than the jerky film we would see otherwise from the flight of the drone. Some drones will only have a small camera on board without a gimbal, but for whose who want to use their drone for aerial photography, a gimbal is essential.
There’s lots of gear to go with the camera (and gimbal), and depending on what you’re interested in, we have the first-person view (FPV) gear guide and the aerial photography guide (coming soon).

We need to power all of this equipment and so we have…
… the battery
When I say battery, I don’t mean your household AA batteries that you buy at the local supermarket. I mean heavy duty, lithium polymer (usually) battery packs such as the one you see below. These will then generally give the drone 20 minutes or more of flight time (not a lot I know but it’s the best we can do at the moment). Again, there are many batteries to choose from depending on your drone and for more information, please see our guide on how to choose the best battery for you.

We need to have something to put all this on and fly, and so we have…
… the frame
The frames (and bodies) that you install everything on range from the most basic arms and plate, to elaborate bodies that encompass all the components and hide them from view. The type of frame the drone has depends on what it is being used for, and the owner of the drone of course. To see a range of frames, please see here.

The frames shown above are:
- the RoboCat 270 Mini FPV Quadcopter Kit
- the FH800 Folding Hexacopter Frame
- the Colour Series FPV Mini Quadcopter Frame
- the X-Cam Kongcopter AQ550 Frame Kit
How it all fits together
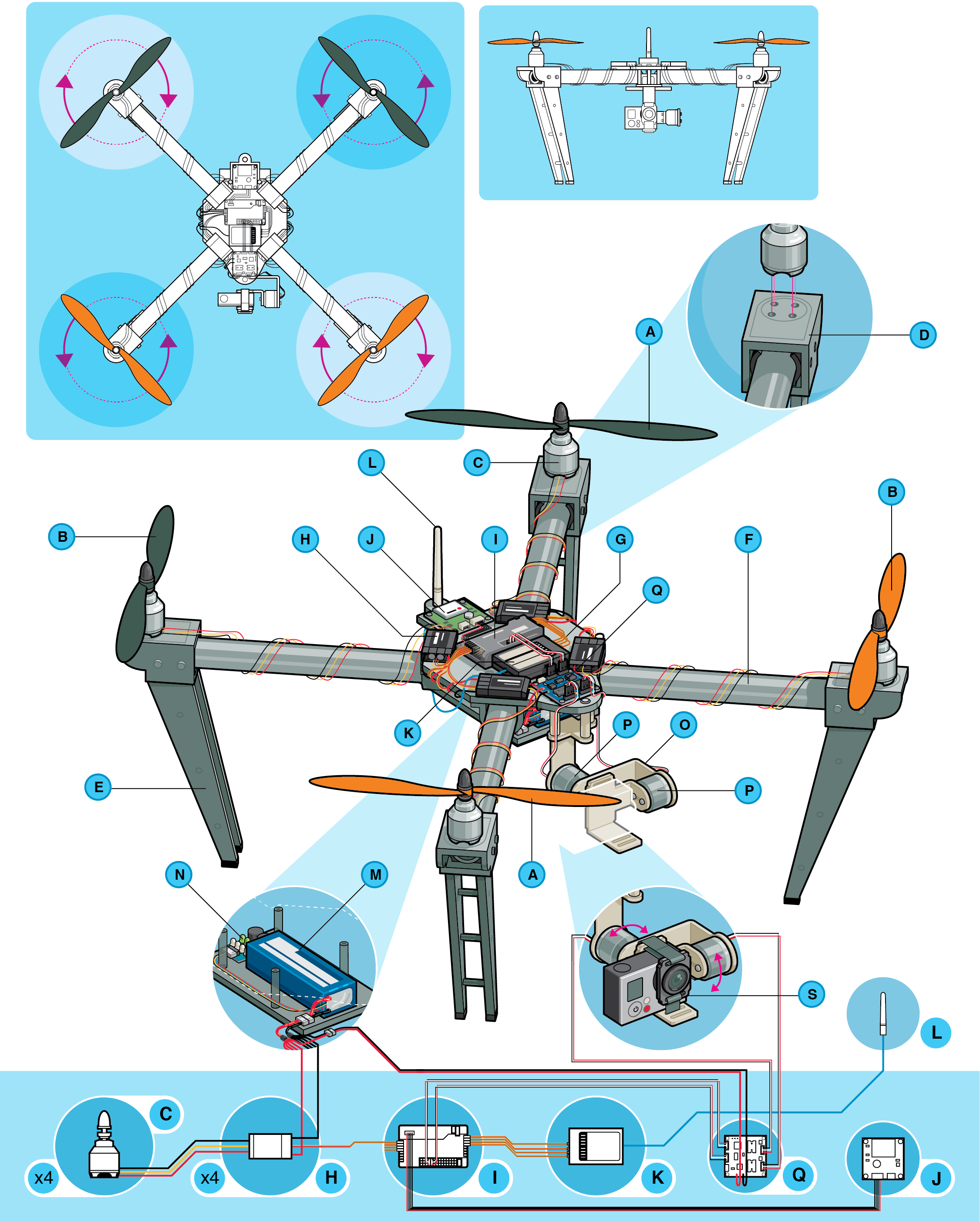
And that’s basically it on a multirotor drone. You can see how all the separate parts fit together in this handy illustrated picture below that goes through all the components (some of which have not been mentioned in this article).
http://www.dronetrest.com/uploads/db5290/227/f81f61e190303344.png
{kind=link}
-
A. STANDARD PROP The same “tractor” propeller used on standard front-engine R/C airplanes.
-
B. “PUSHER” PROP These contra-rotating props exactly cancel out motor torques during stationary level flight. Opposite pitch gives downdraft.
-
C. MOTOR Usually a brushless electric “outrunner” type, which is more efficient, more reliable, and quieter than a brushed motor.
-
D. MOTOR MOUNT Sometimes built into combination fittings with landing struts.
-
E. LANDING GEAR Designs that need high ground clearance may adopt helicopter-style skids mounted directly to the body, while designs with no hanging payload may omit landing gear altogether.
-
F. BOOM Shorter booms increase maneuverability, while longer booms increase stability. Booms must be tough to hold up in a crash while interfering with prop downdraft as little as possible.
-
G. MAIN BODY Central “hub” from which booms radiate like spokes on a wheel. Houses battery, avionics, cameras, and sensors.
-
H. ELECTRONIC SPEED CONTROLLER (ESC) Converts DC battery power into 3-phase AC for driving brushless motors.
-
I. FLIGHT CONTROLLER Interprets input from receiver, GPS module, battery monitor, and onboard sensors. Regulates motor speeds, via ESCs, to provide steering, as well as triggering cameras or other payloads. Controls autopilot and other autonomous functions.
-
J. GPS MODULE Often combines GPS receiver and magnetometer to provide latitude, longitude, elevation, and compass heading from a single device.
-
K. RECEIVER Often a standard R/C radio receiver unit. The minimum number of channels needed to control a quad is 4, but 5 is usually recommended.
-
L. ANTENNA Depending on your receiver, may be a loose wire whip or helical “rubber ducky” type.
-
M. BATTERY Lithium polymer (LiPo) batteries offer the best combination of energy density, power density, and lifetime on the market.
-
N. BATTERY MONITOR Provides in-flight power level monitoring to flight controller.
-
O. GIMBAL Pivoting mount that rotates about 1, 2, or 3 axes to provide stabilization and pointing of cameras or other sensors.
-
P. GIMBAL MOTOR Brushless DC motors can be used for direct-drive angular positioning, too, which requires specially-wound coils and dedicated control circuitry that have only recently become commercially available.
-
Q. GIMBAL CONTROLLER Allows control of direct-drive brushless gimbal motors as if they were standard hobby servos.
-
R. CAMERA GoPro or other compact HD video unit with onboard storage. Real-time streaming is possible with special equipment.