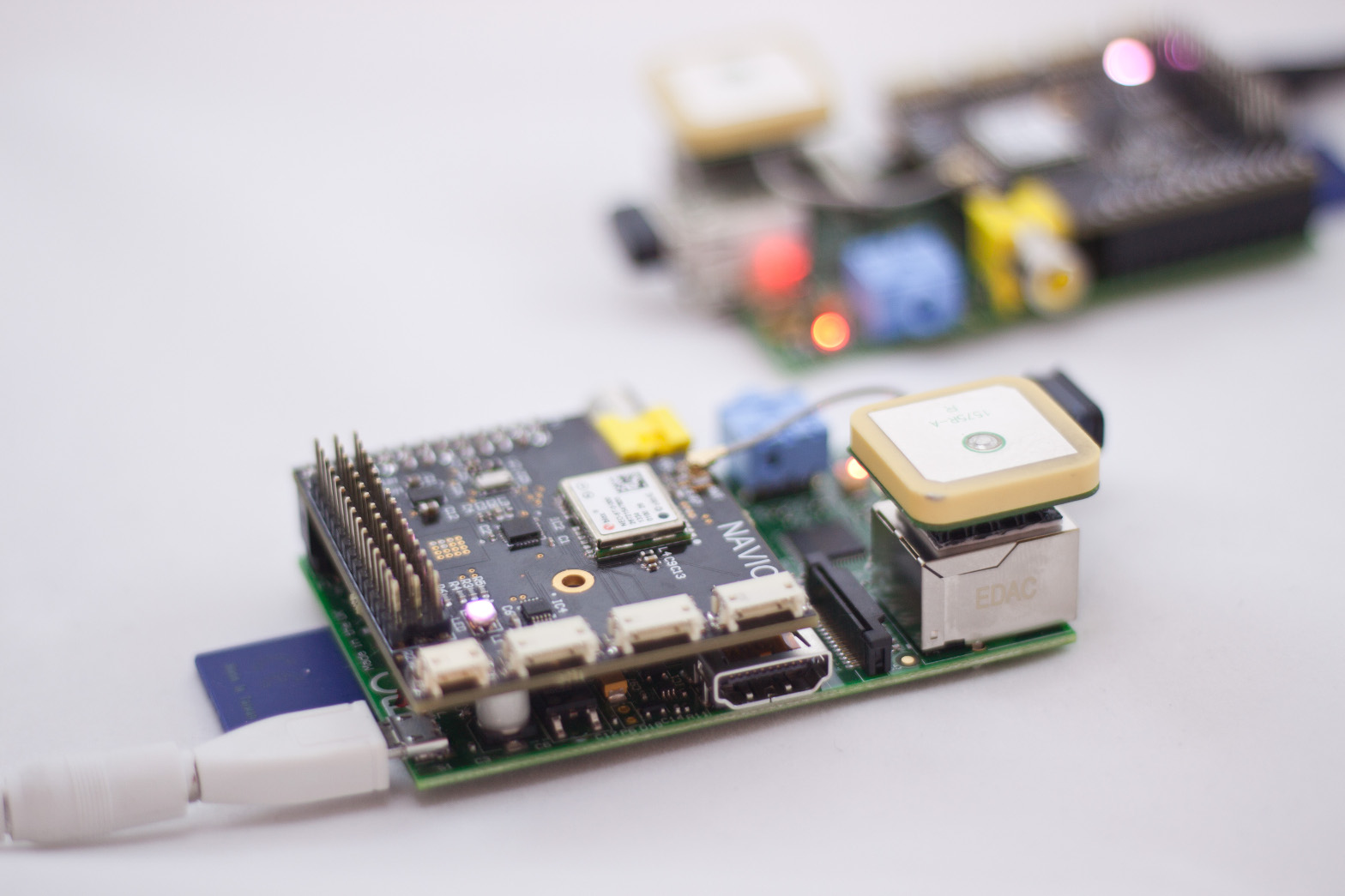
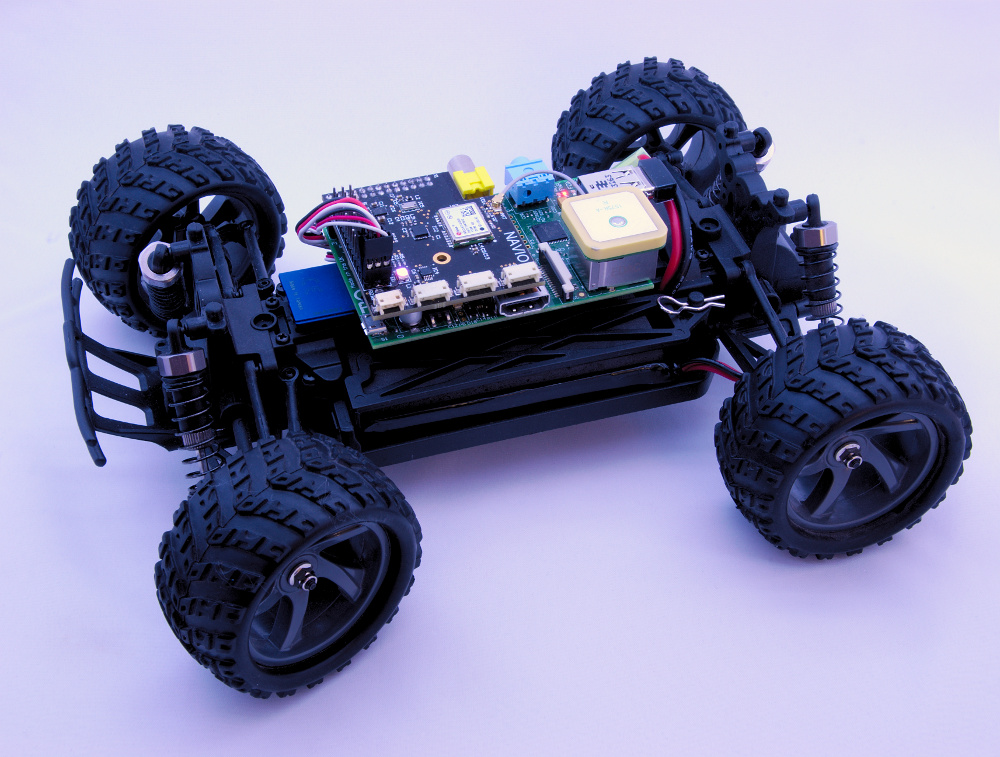
Emlid have been working on a raspberry pi sensor shield that will allow you to use the board as an autopilot! Plans are to port the APM codebase to the platform. They call thier board Navio, and because its got the power or the raspberri pi behind it, it gives you the options to use it for digital streaming video via 3g or wifi. Given the extra processing power it might also be possible to run RTK GPS (real time kinematic GPS) to give super precise positional information! Also depending where you are you could also stream the RTK corrections over GPS via internet if available so you dont always need a second GPS receiver on the ground.
Navio Autopilot Specifications
Here are the specs for the Navio board, given that this is just the prototype I imagine some things will change.
- MS5611 barometric pressure sensor
- MPU9150 (we’ll be using MPU9150 in next batches) 3-axis gyro, accelerometer and magnetometer.
- ADS1115 16-bit ADC
- PCA9685 PWM extender to control servos
- u-blox NEO6T GPS module with raw data on SPI, we saved the only UART on raspberry for Xbee or different telemetry.
- 13 servo connectors
- Pixhawk compatible UART, I2C and SPI connectors
- RGB LED – just because we love them
Overall I think its a great platform and idea and am looking forward to seeing this project progress as you can never have enough autopilot platforms! You can read more and folow thier updates on thier blog/website
What about Pixhawk Fire Cape
A coupe weeks ago I mentioned that the pixhawk fire cape will be released at some point in the future which is effectively the same as the Navio, but for the beaglebone black, another easy to use linux board. But in my opinion given that the beaglebone black comes with a much faster processor, approximately 2x faster than raspberry pi when the beaglebone is clocked down to the same speed as the raspberrry pi. However the rasperry pi does include an integrated graphics core which can possibly used for some GPU processing (not sure about this) I personally think that it will make a better candidate for a ‘powerfull’ autopilot platform. But either way, both will make great platforms for those looking to develop something abit more complex!
Also if anyone is interested in comparing the raspberri pi to the beaglebone black, you can read this great article which goes into all the details.
Alternatively here is the summary
When the BeagleBone Black is the Right Choice
-
Projects that need to interface with many external sensors – The incredible number of pins on the BeagleBone Black and the many bus options allow you to easily interface with pretty much any device out there.
-
Anything requiring small form factor but high speed processing – For example this super cool 33 node Raspberry Pi computing cluster would have been much better off using the BeagleBone Black, both from a price and performance standpoint.
-
Projects that you may wish to commercialize – Since the Raspberry Pi is such a closed-source environment, it is impossible to make your own minimal versions. The open nature of the BeagleBone would allow you to just take the most important features and directly port that into your own design.
-
As an embedded system learning platform – The Raspberry pi has its roots in education, but the fact that the BeagleBone Black works out of the box leads me to believe it is a better solution for learning about embedded systems.
-
For when you want it to “just work” – The fact that the BeagleBone Black works right out of the box is a huge bonus and allows you to get up and going in a few minutes rather than an hour or more.
When the Raspberry Pi is the Right Choice
-
Multimedia based projects – With the significantly more powerful graphics processing and larger number of connection options, the Raspberry Pi is a no-brainer for multimedia interfaces.
-
Community driven ideas – If you have a project that will in some way rely on the community for proper operation, you should choose the very active community of the Raspberry Pi. If you just think you will need support though, the BeagleBone community is very helpful and many Raspberry Pi projects will easily port to the BeagleBone Black.
-
As a graphical learning platform – Since the BeagleBone Black does not have quite the video capability of the Raspberry Pi, I would recommend the Raspberry Pi for learning about Linux in a graphical environment. Though to be fair you could do the same thing in a Virtual Machine, it just isn’t quite as much fun.
Hey,
I am one of the guys behind this project, it has been a long time since this was posted and we made significant progress! A new, improved Navio+ has been launched.

Come and check out here.