Here are a collection of vidieos on how to download, and analyse the logs from your APM or Pixhawk board.
Analyzing log data from ArduPilot 2.6
This first video is a walk through on how to view some parameters from an arducopter flight, and then shows you how to view your fight path in google earth.
APM Mission Planner dataflash overview
This video is a great video to watch if you want to know all the details of the telemetry logs its abit longer and goes into some more details. But after the video you should have a very good understanding on how to analyse your fight logs!
RTL analysis on APM Mission Planner
This video shows you how to analyse the RTL performance of your adrucopter. In the video, the arducopter did not RTL at the same place as it took off from. So Randy looks through the flight logs to see why
Where to get some more information
You can read the full details on the ardupilot wiki
Otherwise if you find or have any great videos on this topic please share them below!
I’ve been looking for quite a while now on analyzing my PixHawk logs, but I still have not found what I’m looking for.
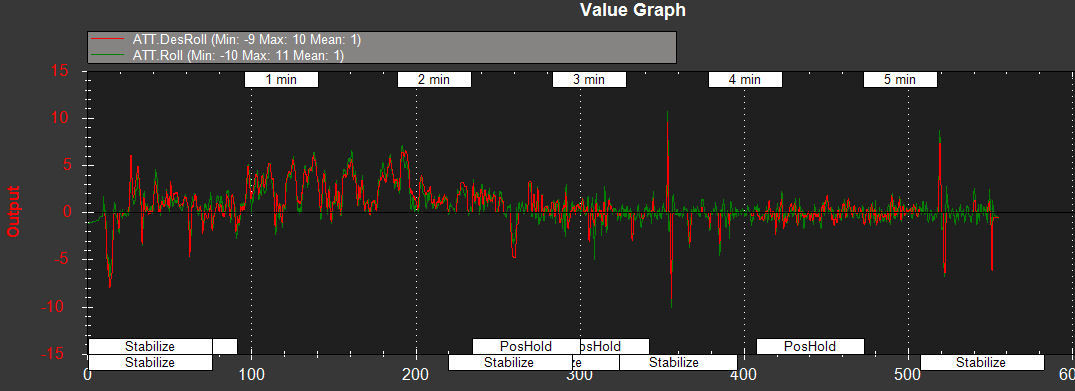
Let me give an example. When I look at this Roll review, is it good enough or can i improve it? And how? Can I analyze from this graph what to tune more (or less)
Thank you in advance
Paul
Its hard to tell from that graph as the resolution is too low and the your aircraft is rolling around too much to easily see any trends. The best way to test is to enter a hover (alt hold) on a calm day, then give an impulse to the roll a few times by moving your roll still to the extreme position quickly and back to neutral on your radio either left or right and wait a few moments for the aircraft to level itself. Then you will be able to look a the logs to see how the aircraft responds. If it takes too long then you can increase the P gain slightly, but if it overshoots alot you will need to decrease P, and change I. I have written a fairly compehensive guide on tuning PID values in my done builder book.
Otherwise you might want to try the autotune feature which does an ok job ant getting your multirotor tuned.
Thank you very much alex,
You’ve been a great help so far.
now it’s my turn to your steps