I have a weird problem where my receiver (an FS-IA6B) fails to connect with my transmitter on startup 90% of the time but only if my ESC is connected.
After a bit of troubleshooting I’ve discovered what appears to be a design flaw in the Pixhawk redundant power system. What seems to be happening is that the main power bus will oscillate for about 220ms on startup if the BEC power from my ESC is connected to the servo bus.
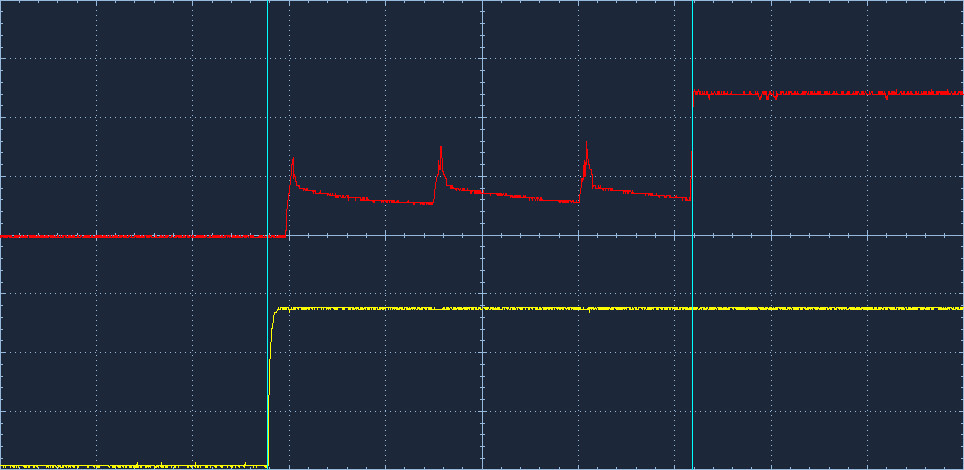
The yellow trace below is the BEC which comes up cleanly, the red is the main bus which seems to be dropping in and out initially before it settles:
My workaround for now is to power the receiver from the servo bus but that rates 11 on the scale of 1 to 10 of bad ideas due to the noise there’s bound to be on there.
Long term I’m going to design something to delay connecting the BEC power to the servo bus on startup as my tests so far suggest that sequencing the power resolves the problem.
Has anyone else come across this issue or perhaps a simpler workaround?
That is very interesting indeed. Just to get a complete picture, are you powering pixhawk via the power module and then via a second BEC on the servo rail for power redundancy, or just via a BEC only?
I have not encountered this before and I am not an expert on the pure electronics side of things (I come from software background) One issue to consider is that are you using a separate BEC, or one from an ESC, if if from an ESC are you only using one? The second issue is that is it a switching BEC/ Linear BEC as I konw switching BECs can cause some issues if more than one are used.
As for your workaround, I am sure this will not be a massive issue as in general R/C receivers are designed to connect directly to same power as sevos/motors so I imagine they will handle this just fine.
I’m using the standard arrangement of a power module to provide power to the PixHawk and the BEC in my (quad) ESC powering the servo rail via single attachment point.
As you can see from my first trace, the servo (BEC) line stays stable the whole time. The main bus seems to start then immediately shut down a couple of times.
This may be due to an excessive load at switch on or just some instablity somewhere in the switching circuit.
I’ve seen it happen on a chinese clone as well with a different receiver which is what makes me think it may be an issue with the reference design.
The downside of my workaround is that I lose the redundant supply feature of the PixHawk. However, I don’t think this is much of a loss since all of my power comes from the main LiPo.
You’re probably right about the noise resistance of the receiver, though servos are notoriously noisy beasts so I’ll have to wait and see.
To give a little context my background is in both electronics and software, though mainly digital rather than analogue systems.