Hello, Thank you for responding.
I did not connect it to the board because I heard of brown out issues, and board voltage warnings, on previous versions of the APM.
I just figured that why not just avoid the possibilities of this, as I had an untapped power source in the Lipo balance plug anyway.
Here are some additional notes, observance and progress I have made, since my last post.
My tail servo plugged into ch7 on receiver, and the servo is powered by and external step-down converter, plugged into the balance plug of a 14V lipo.
The motors arm, spin, and change RPM when the frame is moved in a different orientation. I have no warnings. The servo has proper voltage.
I found this info below on the APM Tricopter wiki, but it seems it is a bit vague.
I believe this page is the issue.
I wish there were clear, concise directions to solve this problem on the wiki. I see people with this problem all over the forums I frequent, but no solutions. I am going to take it upon myself, once I kill this problem, to post on all of the forums I frequent. The solution for others.
It seems that this problem has been over looked, or most likely people like Quads, and other frame types better. No biggie, I like Tricopters for their maneuverability.
Wiki Link to info below…
http://copter.ardupilot.com/wiki/tricopter/
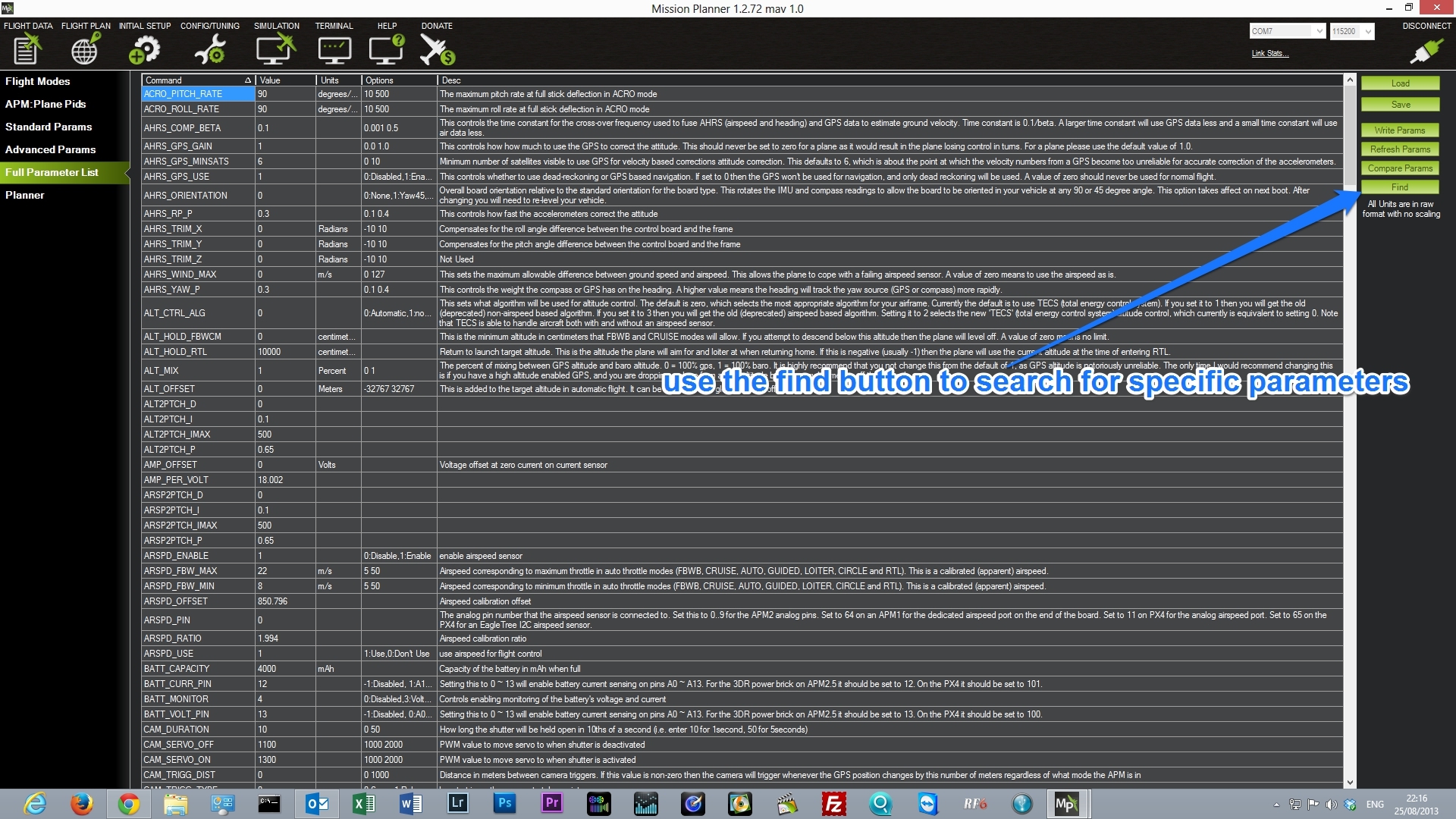
I suspect these settings are in the advanced parameters, correct? The APM Wiki doesn’t mention where to look.
Can anybody make sense of them? If so, can you explain what I need to change?
APM_2_5_MOTORS_TRI
1 Copter 3.3 (and higher)
2 Copter 3.2.1 (and earlier)
Copter 3.3 (and higher)
MOT_YAW_SV_MIN: yaw servo’s lowest PWM value before binding occurs.
MOT_YAW_SV_MAX: yaw servo’s highest PWM value before binding occurs.
MOT_YAW_SV_TRIM: yaw servo’s PWM value close to what is required to keep the tail from spinning.
MOT_YAW_SV_REV: yaw servo’s reverse setting. +1 = servo moves in default direction, -1 to reverse direction of movement.
This is the firmware I am using
Copter 3.2.1 (and earlier)
RC7_MIN: yaw servo’s lowest PWM value before binding occurs.
RC7_MAX: yaw servo’s highest PWM value before binding occurs.
RC7_TRIM: yaw servo’s PWM value close to what is required to keep the tail from spinning.
RC7_REV: yaw servo’s reverse setting. +1 = servo moves in default direction, -1 to reverse direction of movement.