@maxman Haha, a dummy, right? Soft headed mop, I think knew the answer deep down, but still needed to confirm it
As for blades - yes, I was super careful to make sure I put them on the correct motors, and also the correct motors on the arms. That isn’t to say that I got it right of course… time will tell.
Will probably also swap the back props for a different colour, as I’ve seen it on a few quads, and it suddenly twigged as to why: a handy visual aid of direction.
@unmannedtech - Alex, thank you very much! I will defo have a look at that. You guys are awesome
Bit of a break here, been super busy with work, new kitchen etc. Grown up stuff, not at all interesting.
Spun up the rotors indoors - and it took out the top right and bottom left props on the carpet, but tilting one way and then the other. Fair enough, I must have bodged the take off.
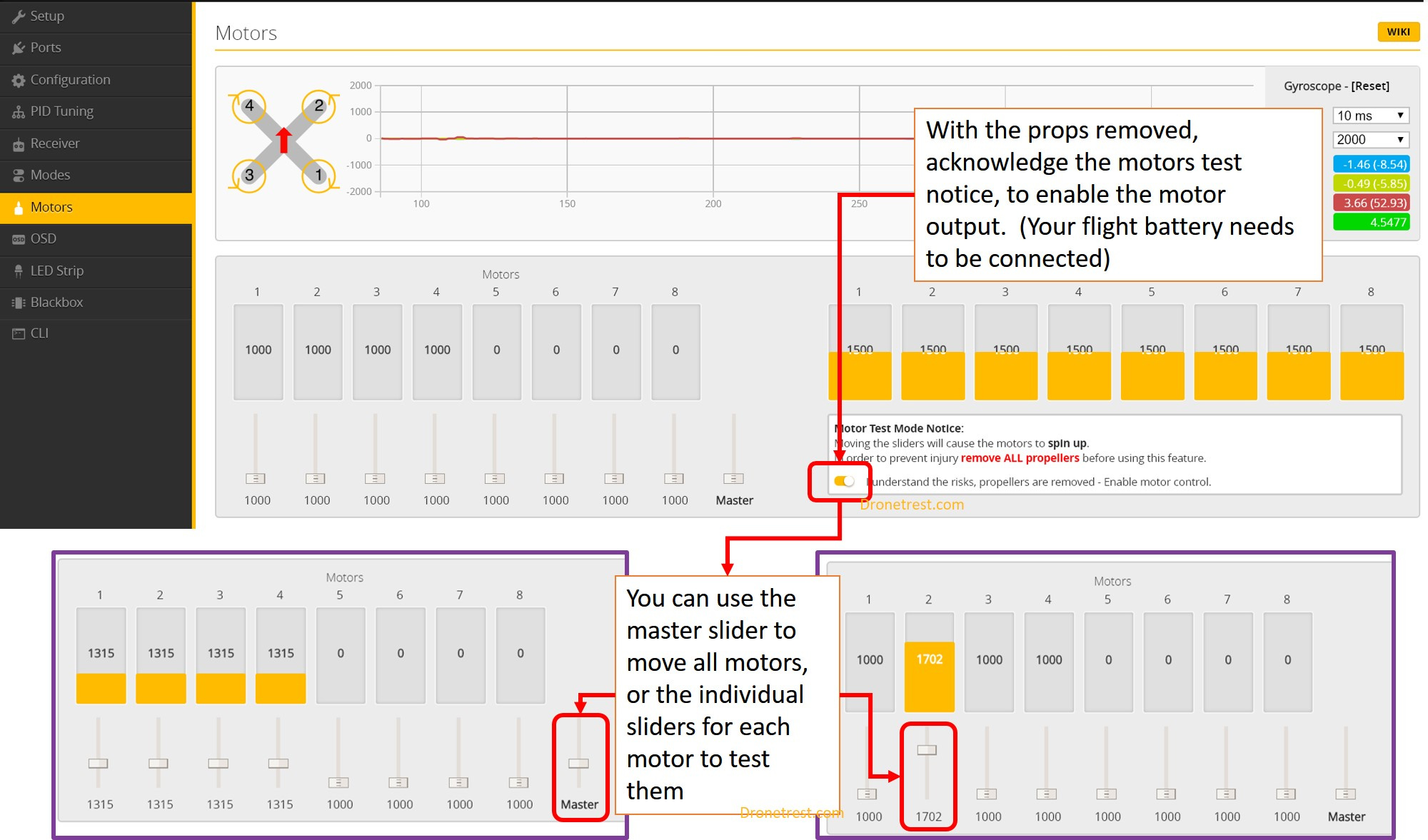
Replaced the rotors, took it outside and tried to spin them up slowly…and the same happened! For it to happen once, maybe pilot error. Twice to the same props? So now I think I must have put it together incorrectly… See pic below, is this a common thing if motors are wired up wrongly? The telemetry when plugged into the PC all moves correctly with the controls, switches are up, and the throttle doesn’t suddenly max out (although the rotors seem to go from 0 > max revs (or I get that impression anyway).
Am at the screen, motor 2 (same numbering key as in your guide) starts spinning in fits and starts at 1137, a rhythmic twitch, on/off/on/off etc. All 4 then spin at 1153, appearing to be be (and feels when I gently tough them) the same speed.
Now I paid special attention to spin direction when putting it together, and I still have wired something incorrectly: I used the same colour nuts as you did in the guide, 1 & 4 black, 2 & 3 blue. HOWEVER, 1 & 4 spin in the correct direction, and 2 & 3 spin in the same direction as 1 & 4, that is, the wrong direction. 1 & 4 spin CW, and 2 & 3 also spin CW instead of CCW.
Now here’s where it gets really confusing: the script printed on the side of the motors in position, says 1 & 4 CCW and 2 & 3 CW. Is it just a matter of de-soldering and swapping some wires into the ESC? I’m thinking the black and white ones from the FC, or is it a bit more involved?
Awesome, that was actually pretty easy using the Chrome app. I reversed 2 & 3, so they now spin correctly.
To stop motor two twitching @ 1137, I went back into the ESC config and tweaked the ‘PPM Min Throttle’ on ESC 2 from 1148 microsecs to 1152. That particular spasm has gone away, and they all start spinning at 1153 in the Betaflight software.
I reckon I’m good to go! Thanks for the pointers (again!). Will try and get out with it this weekend. Will prolly order some more props on monday lol.
It hovers indoors! Blimmin loud though. More of an outside toy
Not all the rotors spin up at once as the power is slowly increased from 0, does this cease to be an issue once airborne and all spinning or is it something that will lead to instability? Is it a tweak of the ESC or the FC?
Haha… how most first flights end up… usually a good idea to practice is horizon mode to start off in
As for.all.the motors not starting at exact time, as long as they all startup in betaflight motor test at the same time then this is normal. As sometimes you might not be taking off from an exactly level surface.
Have had it flying, and kept it in the air for 5 minutes or so, and only crashed it lightly at the end 'cos the sun was in my eyes. Lost a single prop, so that’s progress, I guess!
Would the drone be able to take tri-blade props? It has 2 atm, what difference do they make - do you get more lift for the same throttle (imagine there may be more strain on the motors?) or isn’t not quit as simple as that?
As a rough guide, 3 blade props will gibe you more thrust, but as you said they will also put more strain on your motors and tri blades are also usually less efficient.
Some pilots also prefer 3 blade props as they also feel more stable.
The motors and ESC you get with the Martian kit can take 3 blade 5inch props no problem as you get a set of 5045 Tri blades with the kit
Well… finally got the last bit sorted! Am looking forward to giving it a go.
Thanks for all your help everyone!
Another prop question - can’t find 5030s anywhere - presume 5040/5045 will be ok? Read some stuff that seem to think the 5045s are more stable? Presume will use battery faster though.
Yeah you can use 5040, or 5045 props with those motors, and yeah they will be abit faster.
To record the video you need to use a DVR… but I dont think your monitor has one built in, so the options are:
get a separate DVR and hook it up to the vidoe out of your monitor (or open up the monitor and integrate it (not reccomneded unless you know what you are doing))
Get something like this HD FPV camera+DVR. This is technically better as it records in HD onto the SD card, but can still be used as a regular FPV camra.
Get a gopro sesson (or similar) and mount it to the top of your drone:
Have just bought some disc LEDs to sit under the motors (only to make it easier to see orientation), 5v, do I attach them to the input pins on the FC, post BEC? It won’t cause potential to drop too much will it?
From your answer, as long as it’s from the output of the bec it will be fine. The inputs to the FC are easier to get at. Will that affect the FC at all?



 Remove the props and test the motors
Remove the props and test the motors