The falcon 250 Pro is a great beginner FPV racing drone in many aspects because it uses decent gear, is ready to fly and is also a great price. However the fact that it does not include a comprehensive manual makes it rather difficult to use as your first quadcopter
This is a companion discussion topic for the original entry at http://blog.dronetrest.com/falcon-250-pro-getting-started-guide-the-missing-manual/
1 Like
I am new to quads, never touched one… bought and received my Falcon 250 pro, decided (against better judgement) to follow this process as I couldn’t control the damn thing. NOW I turn quad on (it does it initialize thing) turn radio on, arm (or attempt to arm) the motors and it does nothing. Before when I armed it I would see a red light blink, now I see nothing. all LED’s come on and the radio shows both RX/TX battery levels but the quad just sits there and laughs at my stupid ass.
Can you please tell me what I have possibly done and how to fix it? I waited 2 months to get this darn thing due to 1st one getting lost in mail and now I feel I have bricked the FC (still trying to figure out all the acronyms and abbreviations).
I will add, I did not do the wire port swap, only the cleanflight configuration
Hey, sorry to hear about your frustrations  but that’s why I wrote this guide to try help so we can try figure this out. Did you by any chance update the firmware? As that will reset all the settings on your FC (flight controller)
but that’s why I wrote this guide to try help so we can try figure this out. Did you by any chance update the firmware? As that will reset all the settings on your FC (flight controller)
Check that your quad is arming
First issue with the falcon is that the osd uses the same port as usb, so the best thing to do is to first just disconnect this 4pin OSD wire (and you can reconnect it later to same place if you don’t want to mess around with the settings) then this will allow you to power the reciever and motors to test things via the cleanflight GUI. Also don’t connect/disconnect this if your quad has power connected as the osd module is very sensitive
Then with your props removed connect the falcon via USB to your PC, and also turn on your radio and plug in the battery. Then go to the reciever tab and you should see the bars moving as you move the sticks on your radio. Check that none are reversed and the channels are all correct (IE throttle is the third bar). If that is all working then there should not be any issues arming your quad, by holding the throttle down and yaw full to one side.
I realised that in my guide I did not provide any info on arming/ disarming but this image is super helpful
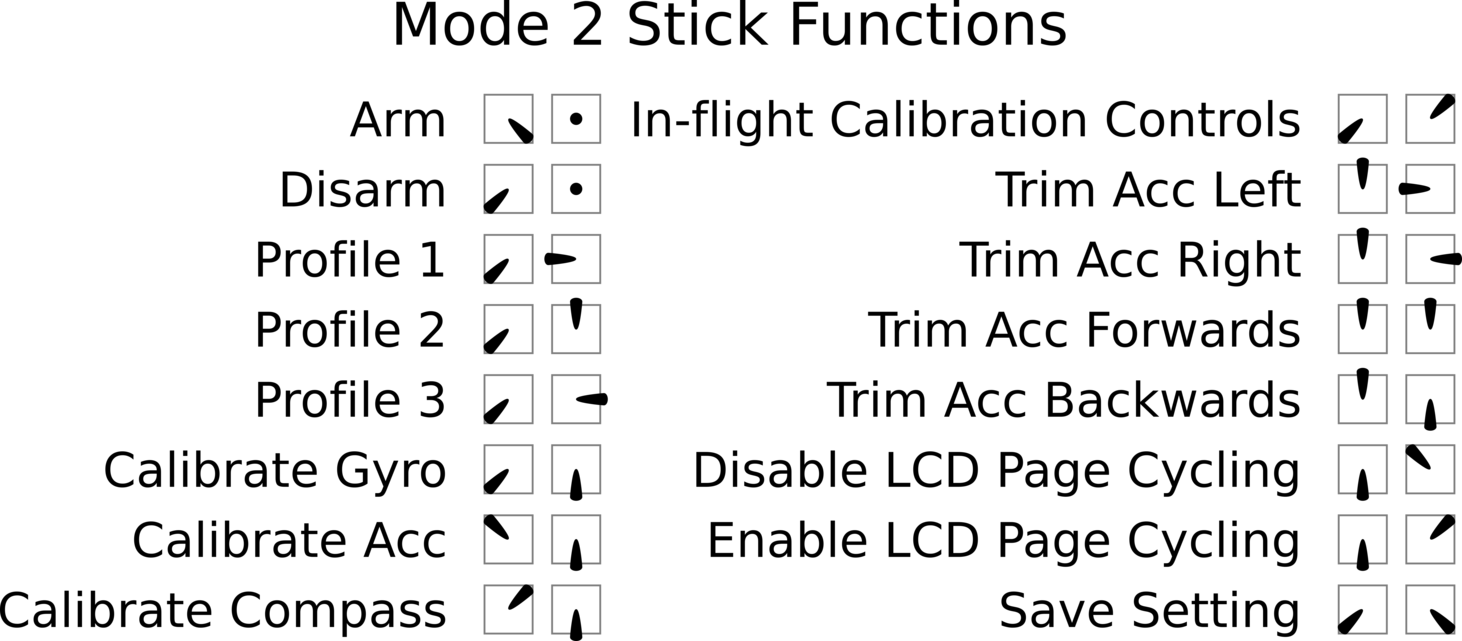
If you find that your radio is being picked up correctly by cleanflight, then the issue of it not arming is likely to be due to the max/min range (end points) on your radio, so when you put your sticks into arm mode, cleanflight does not think k they are all the way on there so does not arm.
Let me know how you get on
Hi
Just a quick intervention from me…
You should turn radio transmitter on first, and after use, turn it off last
Cheers
Steve 
1 Like
I’m assuming this is for right throttle?
I changed the connection where I can have CF and power, its weird, when I move my sticks the LED’s on the quad light up for direction of movement, I calibrated my motors in CF and they spun up at 1060, but when I unplug everything and try to get them to spin up with radio they do nothing. My FPV goggles show disarmed but horizon indicator is now missing and moving sticks in CF did nothing, I’m going to go through everything again but so far this is where I am at.
thanks steve… any chance if I failed doing that it would cause damage? Not saying I did, but in all honesty can’t remember, just wondering.
I do believe I bricked, cratered (or whatever you call it) my Flight controller.
looking into my flight controller logs this is what I see.
once you start seeing the P’s there is nothing but that scattered.
Something I noticed is in CleanFlight it says
Flight Controller, BTFL Verson 3.0.1
Running firmware released Oct 18 2016 10:35:52
Board SRF3 version 0
Does this mean something to you? Shouldn’t it have an actual version#?
If it should, should I try Flashing? and if so what do I use and where do I get it? Will flashing the FC with new firmware fix this? At this point I don’t think I can hurt it (but what do I know, my expertise in computers was limited to Windows 2008 server administration)
anyway, the logs are as follows:
H vbatscale:110
H vbatcellvoltage:33,35,43
H vbatref:0
H looptime:500
H gyro_sync_denom:4
H pid_process_denom:2
H rcRate:100
H rcExpo:0
H rcYawRate:100
H rcYawExpo:0
H thrMid:50
H thrExpo:0
H dynThrPID:10
H tpa_breakpoint:1650
H rates:70,70,70
H pidController:1
H rollPID:43,40,20
H pitchPID:58,50,22
H yawPID:70,45,20
H altPID:50,0,0
H posPID:15,0,0
H posrPID:34,14,53
H navrPID:25,33,83
H levelPID:50,50,100
H magPID:40
H velPID:55,55,75
H dterm_filter_type:1
H dterm_lpf_hz:100
H yaw_lpf_hz:0
H dterm_notch_hz:260
H dterm_notch_cutoff:160
H deltaMethod:1
H rollPitchItermIgnoreRate:130
H yawItermIgnoreRate:32
H yaw_p_limit:500
H dterm_average_count:0
H vbat_pid_compensation:0
H pidAtMinThrottle:1
H itermThrottleGain:0
H setpointRelaxRatio:30
H dtermSetpointWeight:200
H yawRateAccelLimit:220
H rateAccelLimit:0
H deadband:0
H yaw_deadband:0
H gyro_lpf:0
H gyro_soft_type:0
H gyro_lowpass_hz:90
H gyro_notch_hz:400,200
H gyro_notch_cutoff:300,100
H acc_lpf_hz:1000
H acc_hardware:0
H baro_hardware:1
H mag_hardware:1
H gyro_cal_on_first_arm:0
H rc_interpolation:2
H rc_interpolation_interval:19
H airmode_activate_throttle:1350
H serialrx_provider:0
H unsynced_fast_pwm:0
H fast_pwm_protocol:1
H motor_pwm_rate:400
H debug_mode:0
H features:532754
SIÓ‹•≤•–ŒˇˇˇE®·ôPÿPPPPPP PaPPPPP
PPPPPPPPPPPPaPPPPPPI ‘ÿß∂•⁄ŒˇˇˇP“PP PPPPPP
P PPPPPPPPPPPPPP
Hi
No, you won’t have done damage, the TX on first/last is a safety thing so the the quad always has a controlling signal and will not unintentionally go into a flight mode (e.g. RTH) unexpectedly.
Not so important these days with FC’s that require arming, it’s just a good discipline to observe.
The lines:-
Flight Controller, BTFL Verson 3.0.1
Running firmware released Oct 18 2016 10:35:52
show that your FC has Betaflight firmware loaded, have you tried re-configuring using Betaflight configurator?
The latest stable version is BTFL 3.1.5 dated 7 February 2017, pretty new !
I’ve not had much recent experience with these boards so perhaps somebody else on the forum can advise, but IMHO the code dump you quote looks to be corrupted so a re-flash might be in order. If you do you will have to re-enter all your settings and that requires a bit of experience.
Cheers
Steve
The other last resort is to simply setup the arming function on the flight modes tab and use a switch to arm/disarm your quad.
But since you are using mode 1 radio to arm via sticks is throttle down, yaw full left/right if I remember correctly
no… but I will. I have been using cleanflight so now that I know that I will install betaflight, I am literally 3 days new to quads. Thanks for the information
UPDATE: I flashed to 3.1.5 and no change, although the LED’s react to the radio nothing else does and cannot arm.
Hi
After reflash have you gone through every configuration screen to set it all back up again?
Cheers
Steve 
yes, at least to the best of my knowledge, I took screen shots of each tab before doing the flash however I don’t know if that information was good or not being the information on those screens might not have been the original settings and being totally new I don’t know or wouldn’t know if something was off. calibration was successful, motor test/successful, everything works except arming the drone or getting the receiver to respond inside CF or BF.
I have searched high and low trying to find someone that might have listed all the correct settings one needs for an operational Falcon 250 pro, no custom, no changes just the simple settings needed to everything to work and I cannot find them. I know on my receiver tab it lists channel map and RSSI Channel and I have no idea what that is supposed to be… Mine currently shows “default” and RSSI=disabled which is what it showed before. So without knowing what they are supposed to be I wouldn’t know if they were wrong or not.
Thanks a ton for trying help me, everyone, I am trying to learn as fast as I can.
Hi
Do you want post the screenshots ?
Maybe we can spot something that is not quite right
Cheers
Steve
Are the bars moving within the receiver tab when you move your sticks?
As for channel mapping this video will help
And RSSI stands for recieved signal strength indicator and some receievers can output this so you know how strong the signal link is. It’s not required to use, but can important for long range fpv.
No, they have no response at all
That might explain the issue on why you cant arm or fly your quad. When you turn on your quad, do you see any LED on your receiver? Did you disconnect your OSD like I said above so you can power your FC and receiver while having your falcon connected via USB?
@mayesmb1
Let’s see if your TX and RX are binded ? Bound ??
firstly, and I know this goes against previous advice but being as you are setting-up the propellers should be off (if not, take them off now  )
)
secondly, turn off your transmitter and power up the quad
thirdly, look at the LED on your receiver, note what colour it is, is it blinking, if so what is blink speed etc.
fourth, turn on the transmitter, if the LED changes in any way then they probably are bound. If the LED does not alter then follow the instructions for your radio set and bind the receiver
Moving on… if they are bound and as your receiver channel bands are not moving in the ‘receiver tab’ it looks as if the fault is in the receiver type selection in the ‘configuration tab’ If you want to let us know what receiver you have we can suggest the settings you need.
Cheers
Steve
I am currently away from my home but from memory when I turn on the drone I have a blinking red light, I believe I also had a green light on a different board as well but I can’t remember if that was because I had cleanflight hooked up too, anyway If I had to guess at the speed its less than a second (one thousand 1), probably half a second, when I turn on the receiver the red light goes steady. I have the Eachine I6 receiver that came with the Falcon 250 Pro.
Once I get home I will confirm these details but I believe I am correct in my memory. As I have stated before when I move the roll or yaw stick the LED’s on the drone reflect those movements, but that is about all I can get the drone to do.
to answer the other post as well I have moved the FC to port 2 to allow power up while connected to CleanFlight or BetaFlight but that changed nothing on the arming issues… all 4 motors start at 1060 on motor test.
I cannot thank you all enough for helping me out on this
ok… finally back home. when I turn on I get a brief set of blinking red lights, the quad does its initialize with beeps then I have a steady red and green lights. No blinking.
