I dont believe you will need to change the resistors if only using minimOSD. The resistors just need to be changed if you want to get full two way telemetry working.
Hi Alex, That is correct, I just need OSD to have GPS, voltage, etc
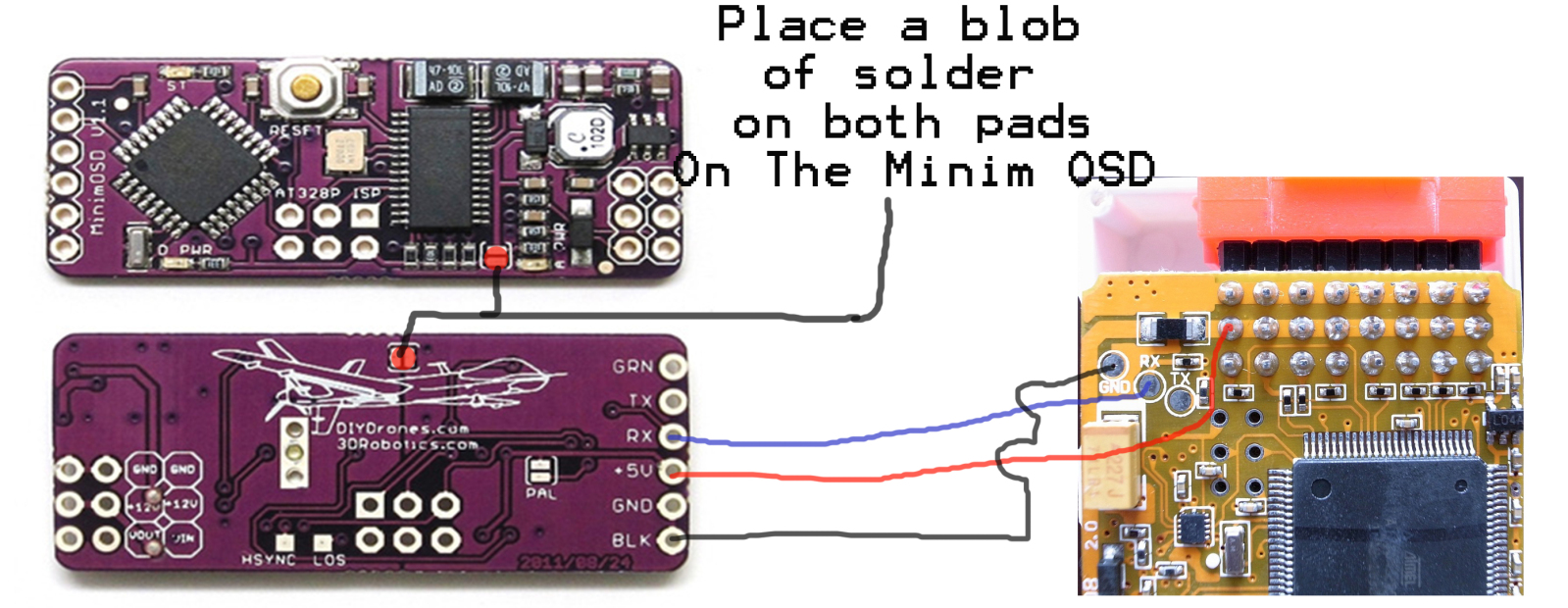
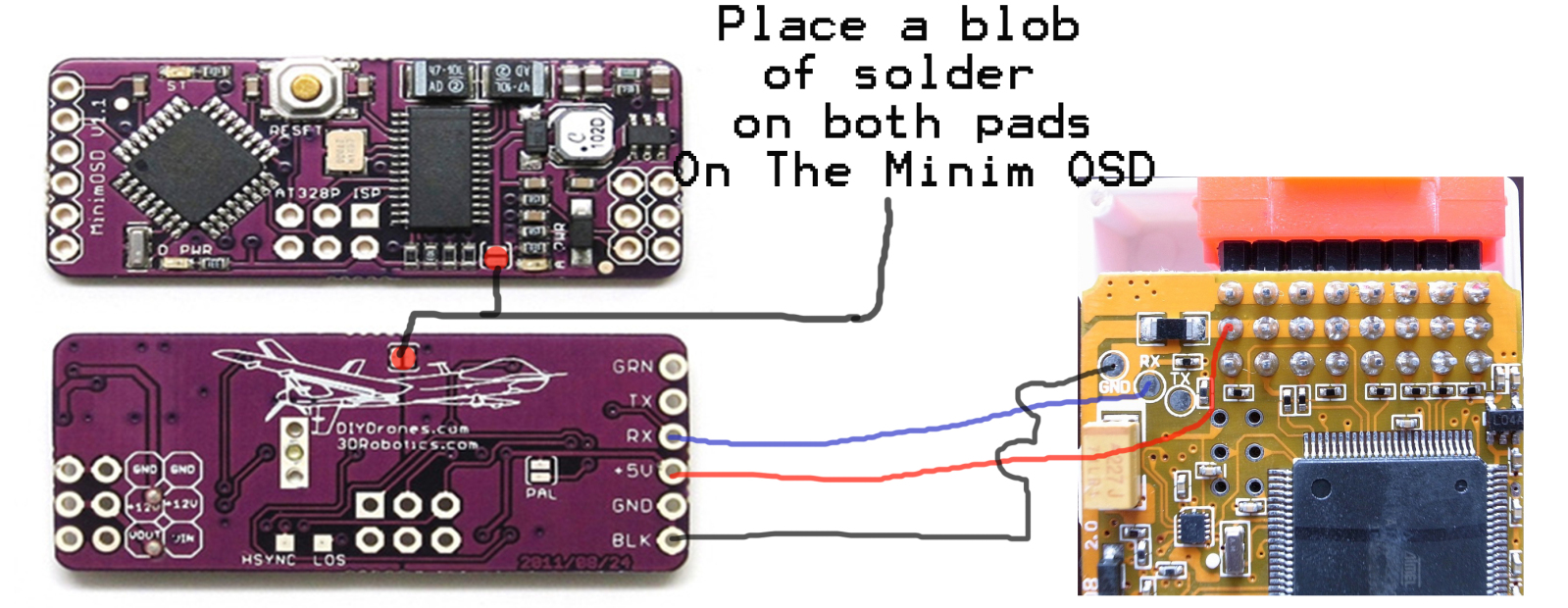
I found this diagra, What do you think about it?
Sorry to bother you . Bregards
Hi Sr
I just need OSD, no telemetry or blutooth or so, I found this diagram, could yo help me to solve this isse for me? Thanks in Advance Gustavo
Yes I do believe that should work just fine. I cant recall off hand what baud rate you will need to set on minimOSD but if it does not work right away try changing between the various baud rates until one of them works.
Thanks again Alex, I will do, regards
Hi guys, could someone please post one complete tutorial ? This thread here is really confusing.
I want the two-way-telemetry to use the follow-mode, I do not care about USB.
Is it enough then to just remove the 0 Ohm resistor ?
What I tried so far:
- removed 0 Ohm resistor
- soldered telemetry-module -> effect: can receive, not sure if send ( use “Tower”-App, which is Droidplanner 3 ), also Missionplanner. How can I test if I can send commands to the drone ?
I tried arming it with the app, this did not work. Then I armed it with the remote and hit “take-off” in the app, this also did not work. - soldered telemetry with a 1k Ohm resistor: |TX-pad| ------ | 1k | ------- |Telemetry-module | … -> effect: same as above, no difference
Facts that might be of interest: Test has been done on balcony, drone did not show gps-lock (no blinking lights), but the gps-position in the app looked fine.
Btw, the info that the devo-m has four screws on the bottom, is glued to the copter and has to be removed would have been a very useful information !
will it make a difference if the ground is connected to black instead of grnd to grnd connection ?
Watch out for this
i notice that using the 3d telemetry included wiring harness to connect my osd board has a wire crossed on the air plugin side.
the yellow wire should go from tx -tx, but this harness has the tx wire going to rx on this harness to the telemetry air box. so if the yellow wire is connected to both tx ports and a 1k ohm resistor in the middle of wire, this should work, also since my no cut wire is yellow, it should go tx port to tx port
It’s because you need to set the SR params for OSD to work without having to be connected to the ground station.
Here is a list of those param settings.
SR0_EXT_STAT,2
SR0_EXTRA1,5
SR0_EXTRA2,2
SR0_EXTRA3,3
SR0_PARAMS,10
SR0_POSITION,2
SR0_RAW_CTRL,0
SR0_RAW_SENS,2
SR0_RC_CHAN,5
SR1_EXT_STAT,2
SR1_EXTRA1,5
SR1_EXTRA2,2
SR1_EXTRA3,3
SR1_PARAMS,0
SR1_POSITION,2
SR1_RAW_CTRL,0
SR1_RAW_SENS,2
SR1_RC_CHAN,5
Watch this video. This shows that it works. One issue I ran into is what type of resistor to use. There are different tolerance level resistors out there and when a 1% or 5% tolerance resistor is used then it wouldn’t connect correctly and it would also mess with USB connecting. You have to use a 0.1% TOL, 0402 size, 1k ohm by the Mega32u2 chip in place of the ZERO ohm and a 0.1% TOL 680 ohm resistor next to the pads on the other side. Its just that simple. But one thing that I don’t believe was talked about was the drift on tolerance on these cheaper resistors. If its a 5% resistor then a 1000 ohm resistor may be 1005 ohms and that’s too high.
1 Like
Hi, I entered these parameters but still no GPS info on OSD unless I connect the quad to APM. What could be wrong? Please help. Thanks
Hi everyone, I’m pretty new here so first of all I’d like to say big THANK YOU to shared these information, very helpful for others who owns X350 Pro including me. Just don’t understand …If I would like to start use DROIDEPLANNER 2 is this modle good enough ?? http://www.ebay.co.uk/ulk/itm/131600243517 ??
I’d like to have all that great functions which Droide Planner 2 offering ![]()
I meant also what’s the difference between single telemetry and dual? Thanks
is it possible to plug 3dR telemetry modual into the micro usb on QR x350 and avoid all that extra work
Hi, I was reading this
and you mention you were going to update how to get 2 way Telemetry without resistors??? Have you found out how yet. Its all a bit scary for me and I dont want to mess up mt Walkera qrx350 pro. Whish i had got the Dji Phantom instead. Please help!
Hi…Sorry to resurrect this thread again.
I’ve had a x350 in the shed for about 2 years and am ready to bust it out. i wanted to add telemetry, but am worried. IF i supply the parts is there someone local to London UK that can perform the mod for me for a charge?
email me at anup.chavda@gmail.com.
Thanks
I got my hands on a QR x350 pro.
Wandering after all these years if someone can recommend the “easiest” way to add telemetry to this aging drone… I am feeling adventurous atm, and given the age thought maybe someone can advise on the above.
Thanks for all the hard work in this thread…