When you command a quad to go forward, it tilts forward, and that creates a forward “thrust”.
What would happen if I attached a horizontal motor/prop onto the quad, and provided a horizontal thrust that way? Would the quad maintain level?
1 Like
Yes you could do that, and the quadcopter could still stay level, but I dont see what the point of that would be, could you let me know as I am interested 
I’m thinking of using a quad to launch model planes up to about 1kg.
Is it possible to attach photos to a post in this forum?
Yes you can add photos by using copy and paste, or by clicking the upload icon on the reply window
Essentially along the line of the skyprowler then?
1 Like
I was discussing this with my son some months ago, but not implicated (he’s now building race quads). The assumption was that since the frame would be receiving movement information in the X plane, then the craft would not need to tilt.
This ought to improve flight times since one would assume that vectoring to maintain Z and achieve X must be less efficient than providing a separate X drive, while Z is achieved with a more efficient 90 degree (vertical) vector.
The issue, without changing the firmware, is how to single-out the ‘X’ part of the signal (assuming that X is forward). A Quad or Hex could of course take advantage of the additional outputs (8) of a normal flight controller if a firmware mod was made. (Would these be penta & hepta drones?)
I would be very interested to hear your results and methods.
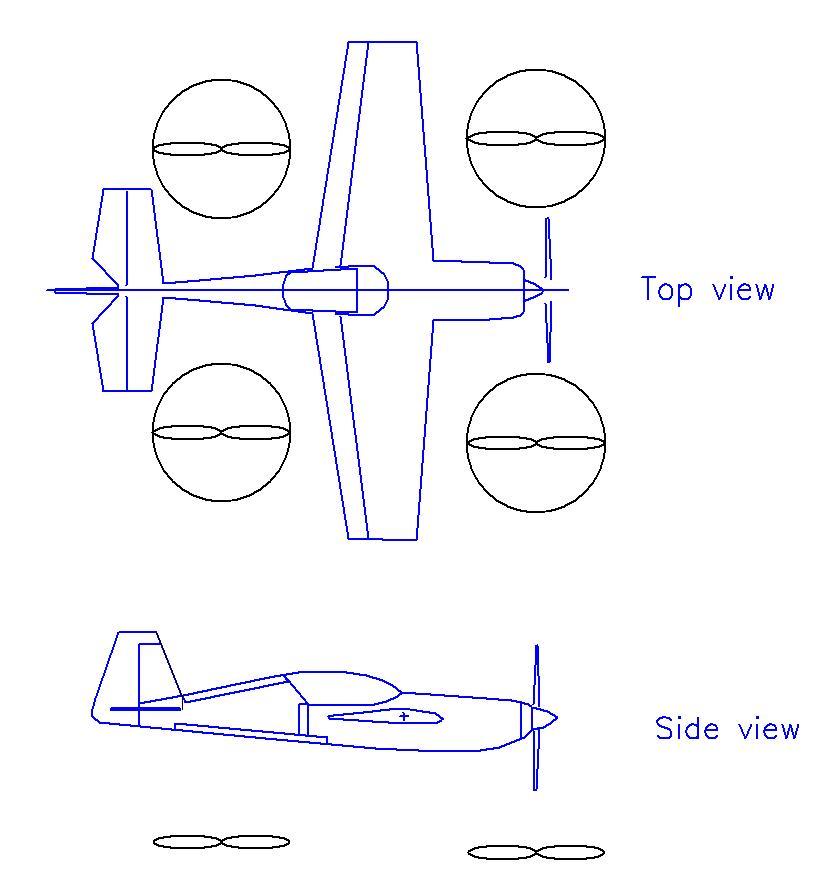
I know that the the latest version of the arduplane software now supports quadcopters, called APM quadplane if anyone is keen to build themself a VTOL drone ![]()
That would be great to have the quad remain horizontal during the take-off run.
I just started to build the frame and received the controller and GPS unit.
It’s going to be a challenge to connect everything correctly.