Just built a 88mm with omnibus f4 micro 4in1 20amp esc, kingkong 1103 7500kv motors, betaflight 3.2.2 Got it all set up motors mapped per betaflight layout. Motors spinning in the correct direction. And the correct props on the correct motors. Problem is it spins out of control and doesn’t fly. I have double and triple checked everything and I don’t get it.
Have you checked the flight controller orientation is set correctly in betaflight?
Flight controller is orientation is correct. Motor outputs are correct. Props are correct. I’m going dub. check when I get home but I’m sure I triple checked everything before I put props on.
When I set it up I had to reassign motor outputs (in betaflight) so esc and motor correspond with betaflight motor layout. I also updated all esc and reversed motors 2&3 so the all motor spin in towards the quad. 1cw,2ccw,3ccw,4cw. The flight controller is spun around but I corrected that in betaflight 180 yaw. Everything looks good in the setup tab quad responds as it should when I move it around. Quad responds to transmitter input correctly in the betaflight receiver tab. I’m kinda at a loss.
When you are on the main page, when you move your quadcopter, does the little 3d model show the exact same motion… so this way you can tell the software is getting the correct attitude of your quad…
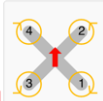
Then step 2, is to check your quadcopter setup in the configuration tab… check that you have selected quad + or quad X (depending on the type of frame you are using)… or if you have as you suggested manually adjusted the motor outputs and that did not work… I would suggest that you double check via the motors tab, so when you spin motor 1, that the correct motor 1 spins according to the diagram… in this case it should be the rear right motor that spins CW…
If all that is correct, then the last thing would be to check your receiver tab, to make sure that is all correct and no strange mixing is going on…
After that I will need to do some more thinking to help you get this sorted…
But at this point it might be best to flash new firmware and do a full chip erase just incase there is an odd setting somewhere… (or maybe you have the wrong firmware loaded for your specific FC?)
Thanks for the help so far. I have done all of the above and reflashed betaflight everything checks out as they should in all tabs. I have ordered a different set of motors as i noticed them getting xtreamly hot and I orderd some capacitors and will install maybe it’ll help.
Thanks
Brad